 |
| Click here to watch a video. |
Microsoft’s Kinect controller offers the first affordable 3D camera that can be used to detect complex three-dimensional motions such as body language, gestures, and so on. It provides a compelling solution to motion tracking, which–up to this point–is often based on analyzing the conventional RGB data from one or more video cameras.
The conventional wisdom of motion tracking based on RGB data requires complicated algorithms to process a large amount of video data, making it harder to implement a real-time application. The Kinect adds a depth camera that detects the distances between the subjects and the sensor based on the difference of the infrared beams it emits and the reflection it receives. This gives us a way to dynamically construct a 3D model of what is in front of the Kinect with a rate of about 10-30 frames per second, fast enough to build interactive applications (see the video linked under the above image). For as low as $100, we now have a revolutionary tool for tracking 3D motions of almost anything.
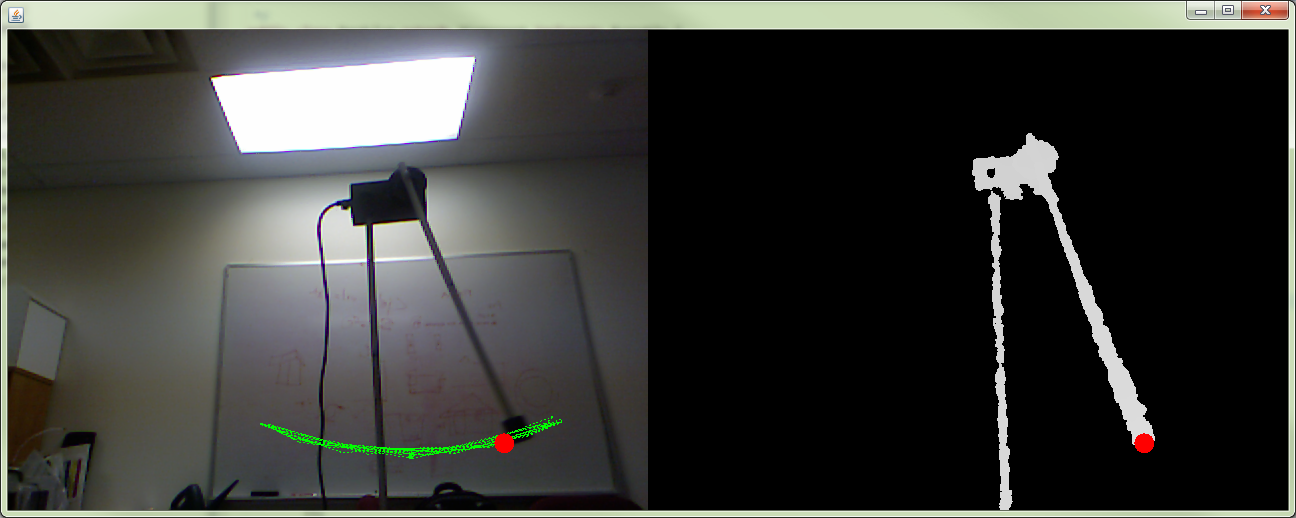
The demo video in this post shows an example of using the Kinect sensor to track and analyze the motion of a pendulum. The left part of the above image shows the overlay of trajectory and velocity vector to the RGB image of the pendulum, whereas the right part shows the slice of the depth data that is relevant to analyzing the pendulum.
The National Science Foundation provides funding to this work.